各校計畫成果
玉山學者 何志明教授_利用複雜系統反應 (CSR) 平台對工程和生物醫學系統進行全局優化
活動簡介
目標
以改變遊戲規則的複雜系統反應(CSR)平台,全局優化工程和生物醫學複雜系統。
簡介
十多年前,我們對優化組合藥物的藥物劑量以改善治療結果感興趣。這些藥物在分子水平上與疾病細胞組件相互作用。然而,疾病是一個系統現象。生物系統的科學基礎位於複雜系統的知識領域 [科學雜誌,1999年4月2日,第284卷,科學雜誌,2009年7月24日,第325卷]。複雜系統可以定義為大量相互作用的組件, 輸入,它們自我組織並產生出一種新興的複雜集體行為, 輸出。
在首次實驗中,非小細胞肺癌細胞系A549在接受三種藥物組合AG490、U0126和indirubin-3'-monoxime(1-3-M)的治療下,即藥物分子與細胞分子的輸入下,其ATP水平和表現型輸出之間被發現存在著二階非線性函數,複雜系統反應(CSR,以前稱為PRS)函數。CSR函數如下。

在生物複雜系統中,CSR函數已在超過30個疾病模型中得到驗證,包括細胞系、動物和臨床試驗。由於CSR平台基於無機制的方法,適用於物理複雜系統。在玉山計劃的第一年中,CSR平台已成功應用於ME/EE製造和抗氧化劑生產項目的全局優化。
成就
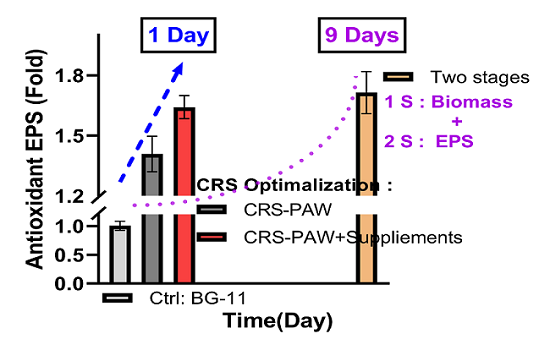
項目1:使用CSR方法促進Spirulina.sp的抗氧化劑EPS生產
- 團隊成員: Ting-Yu Pan, Rong-Shing Chang, Chi-Shuo Chen, Jeffrey Da-Jeng Yao*
- 目標: 通過應用複雜系統響應(CSR)平台,提高微藻抗氧化劑EPS的生產,可以迅速識別全球最佳輸出,節省大量時間、精力和成本。
- 實驗成果:CSR平台使我們能夠優化具有多個參數的巨大搜索空間。首次,我們將等離子體活化水(3個因素)和補充劑(3個因素)添加到BG-11培養基中,找到了最佳的參數濃度組合。Spirulina.sp的抗氧化劑EPS產量增加了9倍。
項目2:以CSR實現高精度機械加工設備適應式熱平衡控制模型參數優化
- 團隊成員: 李明蒼(PI), 莫利僑, 李權峰
- 目標:本計畫的目標為快速建立高精度機械加工設備的熱平衡控制參數模型,對於加工點(TCP)的熱偏斜誤差進行動態調控。透過使用CSR技術,成功快速地建立控制參數優化模型,大幅度地節省時間、人力以及資源成本。
- 實驗成果:經由使用CSR平台,我們成功地以17組實驗建立了一個精準的熱平衡參數調控模型,應用於一個超音波加工中心機。相較之下,使用其他傳統優化分析建模方法需要超過45組實驗。以CSR建立的熱平衡參數調控模型經過實機驗證,在長達3小時的持續動態運轉條件下,可以將TCP的熱偏斜量精準地保持在±1 μm之內,降低約70%的熱偏斜誤差,達成控制目標。
項目3:大腦最佳化學習
- 團隊成員: 朱麗安(PI), 顏伶慧, 呂詠晴, 陳沛承
- 目標: 高效學習的方法有非常多種,但是這些方法往往只有根據經過幾次試誤就得出來的結論作為依歸,因為時間與金錢的限制而沒有做過最佳化的過程。利用CSR, 我們可以利用少數的資料就能精準地將學習方法做最佳化,節省大量的時間金錢成本。
- 實驗成果:經過行為訓練實驗證實,使用CSR優化後的實驗參數訓練果蠅,實際表現分數平均值為82.35,與CSR預測的84.73分相當接近。由此結果可證明透過CSR優化能有效找到最佳大腦訓練模式,並與實際結果有很好的再現性。
項目4:無人機空中作業控制演算技術
- 團隊成員:工研院機械所,E,陳文泉,温盛帆, Jose Felipe Manosalvas Banchon
- 目標:
(1)無人機用來在空中清洗高壓電塔礙子,本研究提出瞄準目標物的閉迴路控制方法,在目標被水霧遮蔽後依然可以追蹤並精準清洗。
(2)透過複雜系統響應 (CSR)平台找出在強風干擾下的最佳穩定性控制馬達輸入量,取代人為操駕,節省大量飛手訓練時間( 1000 hrs 合格飛手訓練 )與人員風險。 - 實驗成果:使用一台軸距3m的大型無人機酬載30L水箱進行場域驗證,在距離礙子2.5m處使用Snipper approach可以準確清洗目標物,並在水霧遮蔽下持續清洗目標。

何志明-清洗電力塔絕緣子無人機飛行試驗後合影
項目5:應用CSR(Complex System Response)於自駕車煞車模組變異分析研究
- 團隊成員:工研院機械所,D,陳斌勇,何政翰
- 目標:自駕車煞車模組長期在避障過程中煞停作動,而產生性能變異,所以透過CSR找出煞車模組變異性,解算出煞車模組相對變異達某一程度狀況(連續3次以上煞車距離誤差>30%),則決策端可自動調整煞車深度命令值。
- 實驗成果:
(1)影響因子設定有三,包含減速度、車速,車重。
(2)分二階段實驗進行。
(3)第一階段以減速度和車速為主;第二階段以減速度、車速和車重。
(4)以5 ton物流車為實驗目標車。
(5)已進行第一階段實驗。
(6)進行曲線擬合中。
項目6:輕合金熱成型製程技術開發
- 團隊成員:工研院機械所,G,蔡明城,呂寧遠,黃宣諭
- 目標:
(1)符合公差條件下尋找最優生產效率的製程參數。
(2)通過應用複雜系統響應(CSR)平台,在沖壓應用上,可以減少盲目尋找製程參數的時間,從而降低試錯成本(材料與人力),快速找到所需的最佳製程參數。 - 實驗成果:
(1)在實際沖壓實驗中,以變薄率作為功效值,材料溫度與震動次數作為factor,成果顯示CSR預測結果與實際沖壓結果準確度高達83.95%。
(2)在模擬沖壓實驗中,以最薄厚度作為功效值,材料溫度、震動次數與震動速度作為factor,成果顯示CSR可以提供符合公差條件下尋找最優生產效率(震動速度)的製程參數,並且與模擬沖壓相比準確度高達96.92%。
項目7:奈米流體參數設計
- 團隊成員:工研院機械所,K,何亞奇,胡恩蘭,吳采亮
- 目標:利用CSR進行奈米流體在熱管、重力熱管、虹吸式熱管的參數優化。石墨烯和耐米流體為工研院機械所自製。參數包含:奈米流體(石墨烯)的重量百分比;分散劑的重量百分比,為了讓石墨烯能夠更均勻在流體中做熱交換。最後包含注水量的比例。而目標值第一為最大熱傳量,單位體積下可以帶走多少熱量;第二目標為熱傳導係數,讓熱管內部的溫度可以均勻。
- 實驗成果:初步進行CSR測試,有效找到奈米流體的重量百分比、分散劑的重量百分比以及奈米流體注入熱管的注水量比例。其中石墨烯奈米流體在CSR可以發現和分散劑或者注水量進行擬和,都能夠找到一組曲面方程式。後續將利用這些曲面方程式,進行奈米流體最大熱傳量和熱傳導係數的最優化設計。
項目8:利用CSR function應用於鍍膜製程最佳化及其特性研究
- 團隊成員:工研院機械所,M1, 陳文鈞,林士欽,林義鈞,王慶鈞
- 目標:
(1)此項目針對不同製程參數(射頻能量, 真空腔壓力, 真空腔溫度, 氨氣/矽烷流速比與總反應氣體流速),透過應用複雜系統響應 (CSR)平台,對PECVD氮化矽薄膜的薄膜品質與介電特性進行製程參數的最佳化分析。
(2)通過應用複雜系統響應(CSR)平台,與傳統的試錯法相比,可以快速確定參數範圍內的薄膜品質與介電特性最佳點。 節省了數量級倍數的時間(12倍,從3-6個月到2週)、實驗次數( 2倍,從30-50次到26次)、精力和成本。 - 實驗成果:在低溫PECVD氮化矽薄膜製程,透過應用複雜系統響應 (CSR) 平台最佳化分析,成功找出薄膜最高鍍率與薄膜內雜項含量的最低比率。
在高溫PECVD氮化矽薄膜製程,訂定了製程參數範圍,預計依照實驗設計表進行實驗,對薄膜鍍率與殘留應力作最佳化分析。
項目9:高深寬比電鍍藥液之最佳成分組成研究
- 團隊成員:工研院機械所, M2, 張佑祥, 黃萌祺, 傅鈺婷
- 目標:
(1)Step 1:此項目針對電鍍填孔製程中通孔中心形成架橋之不同參數—電流密度、氯離子濃度及各添加劑(加速劑、抑制劑及平整劑)濃度,共五種參數,利用複雜系統響應(CSR)進行電鍍參數最佳化以得到最快速形成架橋且不易產生缺陷的參數組合。
藉由複雜系統響應(CSR)平台的應用,可以在設定的參數範圍內快速得到以形成架橋為目標之最高效率的參數組合,相比於傳統經驗試錯法,節省了數月的時間、精力及成本。
(2)針對電鍍填孔製程中填滿通孔之不同參數—電流密度及陰極旋轉轉速,兩種參數,利用複雜系統響應(CSR)進行電鍍參數最佳化以得到最快速填滿通孔的參數組合。
藉由複雜系統響應(CSR)平台的應用,可以在設定的參數範圍內快速得到以填滿通孔為目標之最快速的參數組合,相比於傳統經驗試錯法,節省了數週的時間、精力及成本。 - 實驗成果:
(1)透過複雜系統響應(CSR)的分析,成功得到最快速形成架橋且不會產生缺陷的參數組合並完成實驗驗證。
(2)預計依實驗設計表進行實驗,再由複雜系統響應(CSR)分析以得出最快速填滿通孔的參數組合。
項目10:CSR多軸機器人轉矩最佳化技術, CSR應用於機械手臂IK求解
- 團隊成員:工研院機械所,Q,蔡承翰,紀佃昀,許勝傑
- 目標:
(1)在過去,機械手臂一直追求最短路徑,但最短路徑未必是最節能的。因此,本研究旨在找到機械手臂各軸的最小扭矩路徑。由於電機扭矩與能量消耗相對應,因此本研究的最終目標是通過尋找最小扭矩路徑來優化機械手臂操作的功率輸出。
(2)在對於冗餘自由度機械手臂的逆運動學計算上,往往需要消耗許多運算時間,本研究目的在於運用CSR演算法來設法縮短逆運動學計算時間。 - 實驗成果:
(1)找到1組較佳解,並持續驗證中。
(2)設法找出機器人逆運動學是否為複雜系統。